kreatives-chaos.com
Elektronik und Roboterbau
Themen:
AVR, avr-gcc, CAN, CPLD, Elektronik, Mikrocontroller, MSP430, PIC, Roboter, Schaltungen, Sensoren, Software, Testboards
Kategorie: AVR
CAN Testboard 40 v3

Eine Experimentierplatine im halben Eurokarten-Format für alle möglichen Schaltungen die am CAN Bus hängen sollen.
CAN Bootloader

Mit dem hier vorgestellten Bootloader lassen sich AVRs die an einem MCP2515 angeschlossen sind über den CAN Bus programmieren.
CAN Debugger

Ein kleiner Adapter um auch einen CAN Bus bei 1 MBit mit voller Auslastung mithören zu können.
CAN Testboard 40 v2

Eine Experimentierplatine im halben Eurokarten-Format für alle möglichen Schaltungen die am CAN Bus hängen sollen. (ACHTUNG: Es gibt eine neuere Version der Platine)
SJA1000 Testboard

Um auch den zweiten der gut erhältlichen externen CAN Controller (neben dem MCP2515) mal auszuprobieren ist dieses Testboard entstanden.
Belichtungstimer

Der Belichtungtimer ist als kleines Projekt zwischendurch entstanden. Ein ATTiny2313 steuert einen 230AC Verbraucher (bis 10A) über ein Relais an. Die Benutzerführung erfolgt dabei über vier Siebensegment-Anzeigen und drei Taster, damit lässt sich die Zeit in Minuten und Sekunden einstellen (bis zu 99 Minuten).
Universelle CAN Bibliothek

Eine CAN-Bibliothek die neben dem MCP2515 auch einen AT90CAN32/64/128 oder SJA1000 ansteuern kann.
FastBoot 1.7 Frontend (Python)
Ein Frontend für den seriellen AVR Bootloader FastBoot v1.7
S8IO8-Servocontroller

Der S8IO8 ist der Nachfolger des S8IO, mit einem ATMega48/88/168 anstelle des ATTiny2313 und einer wesentlich flexibleren Firmware.

Codeschnipsel für avr-gcc
Kleine Programmbeispiele zu folgenden Themen:
- Verwenden des Analog/Digital Wandler
- PWM mit Timer1
RS232 Servocontroller S8IO
Wie der Name schon andeutet wurde der Servocontroller auf Basis der RS232 Version von RNKC10 jetzt um die Möglichkeit auch I/O-Pins zu steuern erweitert. Geplant ist außerdem S8IO auch um eine I2C Version zu erweitern, allerdings fehlt mir im Moment die Zeit dazu.
ATMega48/88/168 Testboard v2.0

Nun gibt es also auch das ATMega8 Testboard in einer zweiten Version. Wie auch beim ATMega16/32 Board sind nun alle Port-Stecker so platziert das auch gewinkelte Wannenstecker verwendet werden können. Neben einem I2C Eeprom sind jetzt auch alle Pins zusätzlich auf Buchsenleisten geführt, so dass man sie einfach mit einem Steckbrett verbinden kann.
Gameboykamera Modul

Mit diesem Modul kann man sehr einfach eine Gameboykamera an einen AVR anschließen. Gameboykameras gibt es zum Beispiel relativ günstig bei Ebay zu ersteigern (teilweise für 1 Euro). Sie bieten eine Auflösung von 128x128 Pixel und einige andere nette Features wie zum Beispiel einfach Kantenerkennung usw.
Servocontroller RNKC10
- Ansteuerbar über die serielle Schnittstelle
- Ansteuerbar über I2C Bus
- Anschlüsse für bis zu 10 Servos

Ansteuerung des UART mit avr-gcc
Wie steuert man mit avr-gcc in C den UART an?
Codeschnipsel zu den Themen:
- Ansteuerung des UART
- Verwenden des UART mit Interrupts
- Strings aus dem Flashspeicher ausgeben
ATmega16/32 Testboard v2.0

Das ist nun also die nächste Version des ATMega16/32 Testboards. Es wurde vor allem die Position der Stecker überarbeitet und mehr an den Rand gerückt, so dass man die Boards jetzt besser stapeln kann. Dabei wurde auch gleich die Führung der Versorgungsspannungenleitungen verbessert.
Einführung in die AVR Reihe

Die AVR Reihe von Atmel besteht aus meheren sehr leistungsfähigen Mikrocontrollern. Die einzelnen Mikrocontroller unterscheiden sich hauptsächlich in der Größe des Programmspeichers, des RAM und den unterschiedlicher Peripherie. Die Bandbreite der Peripherie erstreckt sich dabei von 10-Bit Analog/Digital Wandler, über Pulsweitenmodulierte Ausgänge bis zu asyncronen/syncronen seriellen Schnittstellen (UART, TWI, SPI), frei konfigurierbaren Hardware Watchdogs, 8/16-Bit Timerblöcke bis zu Brown-Out-Detection.
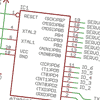
AVR Grundschaltungen
Es geht hier um die AVR-Grundschaltungen (in diesem Fall exemplarisch am ATMega8 gezeigt, aber natürlich auch auf fast alle anderen Typen übertragbar), also die Schaltungen die man braucht um den AVR betreiben zu können.
CAN Testboard

Ein Testboard mit einem ATMega 8 und einem MCP2515 CAN Controller um ein bisschen mit dem CAN Bus herum zu spielen. Neben CAN gibt es auch noch Anschlüsse für I2C und RS232 (für die Verbindung zum PC).
über Mikrocontroller und ihre Schnittstellen
Moderne Mikrocontroller haben ein ganzes Arsenal an verschieden Schnittstellen. Neben UART und SPI finden sich I2C (TWI), CAN und sogar USB. Ich will in diesem Artikel einmal versuchen die verschieden Schnittstellen vorzustellen und zu vergleichen.
AN910 Programmer

Von Atmel gibt es eine Application Note aus dem Jahr 2000 die den Bau eines Programmieradapters mit einem AT90S1200 für die serielle Schnittstelle beschreibt. Dieser ist von diversen Leuten verbessert und für den AT90S2313 angepasst und wesentlich verbessert worden.
SI Prog

SI Prog stammt von Claudio Lanconelli. Es ist ein universeller Programmieradapter für die serielle Schnittstelle mit dem sich mit den entsprechenden Adapter eine vielzahl von IC programmieren lassen. Die Liste reicht dabei von I2C Eeproms, SPI Eeproms über PICs bis hin zu AVRs.
STK200 Programmieradapter

Dies ist eigentlich die Standard Schaltung wenn es darum geht AVRs in der Schaltung zu programmieren. Ein Großteil der Programmer die man kaufen kann sind nach diesem Prinzip aufgebaut.
AVR-Programmieradapter
Um AVRs zu programmieren gibt es viele verschiedene Möglichkeiten. Von einfachsten Programmieradaptern die mit ein paar Widerständen am Parallelport auskommen bis hin zu kompletten Experimentierboards mit integrierten Programmieradapter gibt es ein ganze Menge Schaltungen die man benutzen kann.
Welchen Mikrocontroller soll ich eigentlich nehmen?

Es gibt nicht den einen richtigen Controller. Jeder muss selbst entscheiden was er für ein bestimmtes Projekt von der Rechenleistung, dem Programmspeicher oder der interner Peripherie her braucht, was ihm am besten gefällt und natürlich auch womit er umgehen kann.
Lizenz
 Alle Inhalte dieser Website sind, soweit nicht anders gekennzeichnet, unter einer Creative Commons 2.0 License veröffentlicht.
Alle Inhalte dieser Website sind, soweit nicht anders gekennzeichnet, unter einer Creative Commons 2.0 License veröffentlicht.
Wenn Sie sich für eine kommerzielle Verwertung meiner Inhalte interessieren, kontaktieren Sie mich bitte direkt.