kreatives-chaos.com
Elektronik und Roboterbau
Themen:
AVR, avr-gcc, CAN, CPLD, Elektronik, Mikrocontroller, MSP430, PIC, Roboter, Schaltungen, Sensoren, Software, Testboards
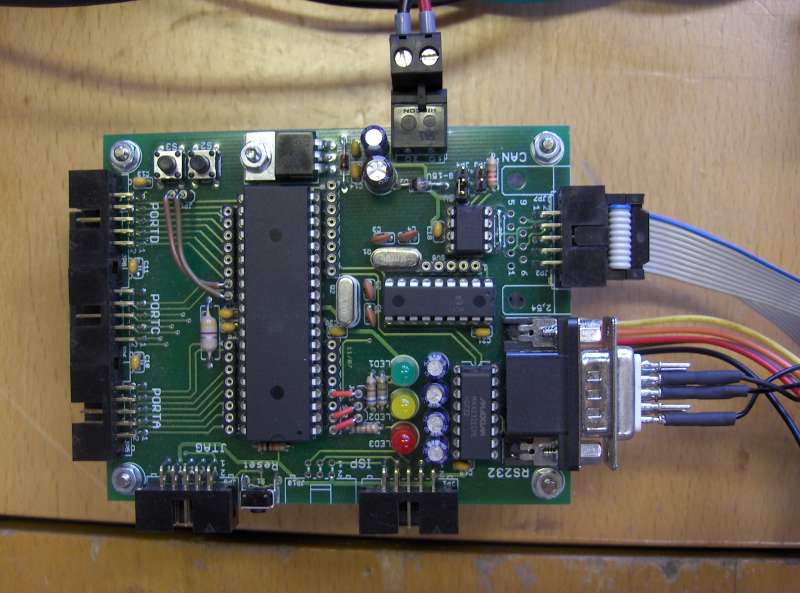
CAN Testboard 40 v2
Tags: Elektronik,
AVR,
CAN,
Testboards
Stand: 8. September 2008, 16:03
7 Kommentar(e)
Nachdem sich schon mit der ersten Version der Platine schnell Schaltungen aufbauen und testen ließen, habe ich nochmal eine zweite, verbesserte Version der Platine entwickelt.
Mittlerweile ist auch diese Version wieder “veraltet” ;-) Die neue Platine findet sich hier.
Die Bauteile sind insgesamt näher zusammengerückt, der entstandene Platz wurde dann für ein kleines Lochrasterfeld genutzt, um zum Beispiel mal eben so einen Sensor anbauen zu können ohne eine extra Platine zu benötigen. Man kann die Platine aber auch einfach auf eine Lochrasterplatine stecken (wenn man anstatt der Wannenstecker von unten Buchsen-/Stiftleisten einbaut), da sämtliche Anschlüsse in einem 2,54mm Raster liegen.
Außerdem kann man jetzt den CAN Controller jetzt sowohl in DIP als auch in SMD bestücken, da die DIP Variante nur schwer zu beschaffen war.
Features
- ATMega 16/32/644
- MCP2515 CAN Controller
- als DIP oder SO-18 bestückbar
- MCP2551 oder PCA82C250/251 als CAN Treiber
- CAN Stecker nach CiA Vorschlag
- 10-poliger Wannenstecker oder
- Sub-D Stecker
- 120 Ohm Abschlusswiderstand per Jumper aktivierbar
- Versorgungsspannung auf dem CAN Bus per Jumper zuschaltbar
- 5V oder >7V über den Spannungsregler
- 5 Volt Festspannungsregler
- RS232 Treiber (Max232)
- Standard ISP Stecker zum Programmieren des AVRs (6- und 10-polig)
- Reset-Taster
- kleines Experimentierfeld (Lochraster)
- Port A,C,D auf Wannenstecker geführt
- Alle Pins über Buchsenleisten verfügbar
- 5 frei verwendbare LEDs
- 2 frei verwendbare Taster
- I2C Temperatursensor (LM75 oder DS1631) und ein I2C Eeprom (24LCxx) bestückbar
- Platinengröße 100x80mm
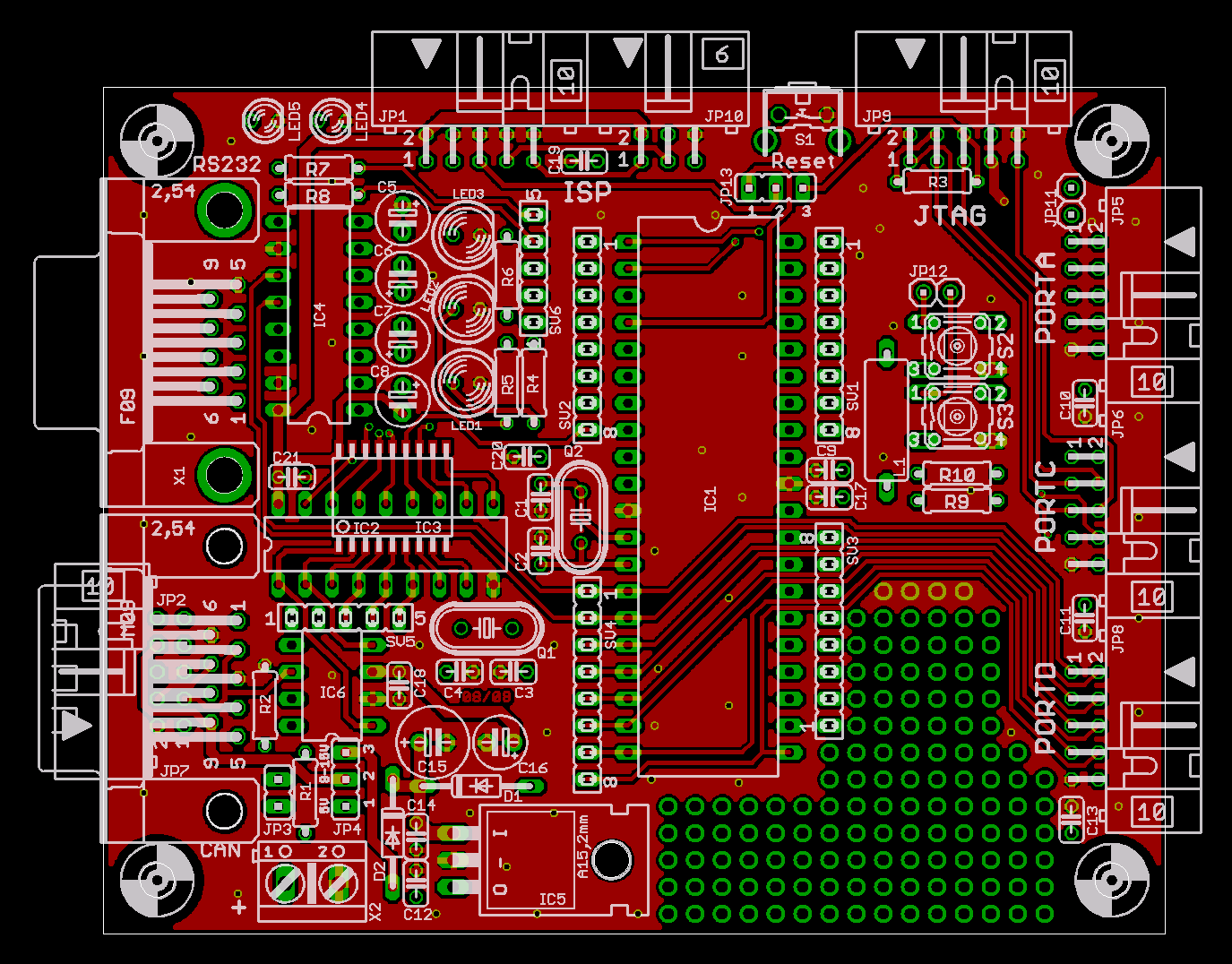
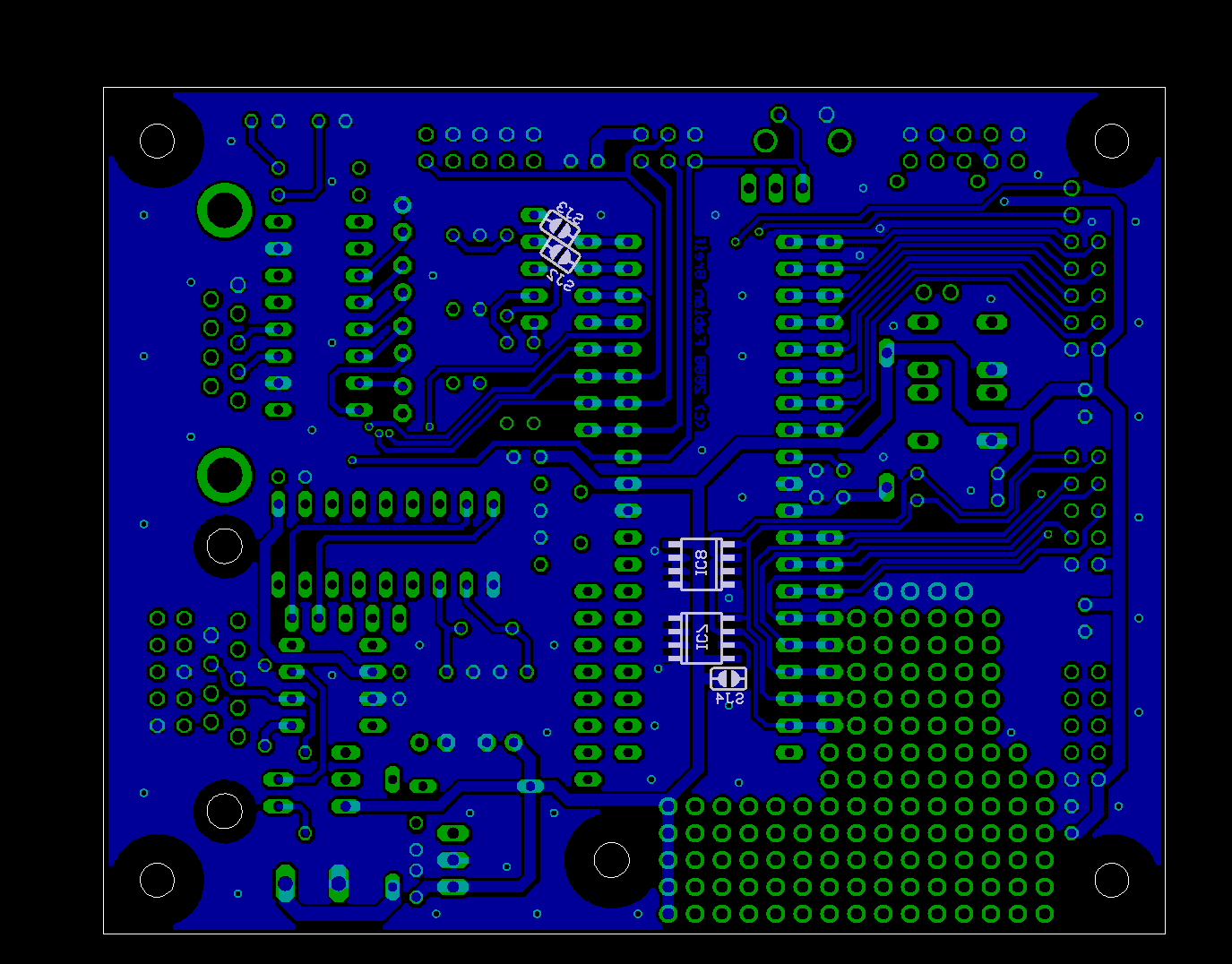
Schaltplan und Platinenlayout
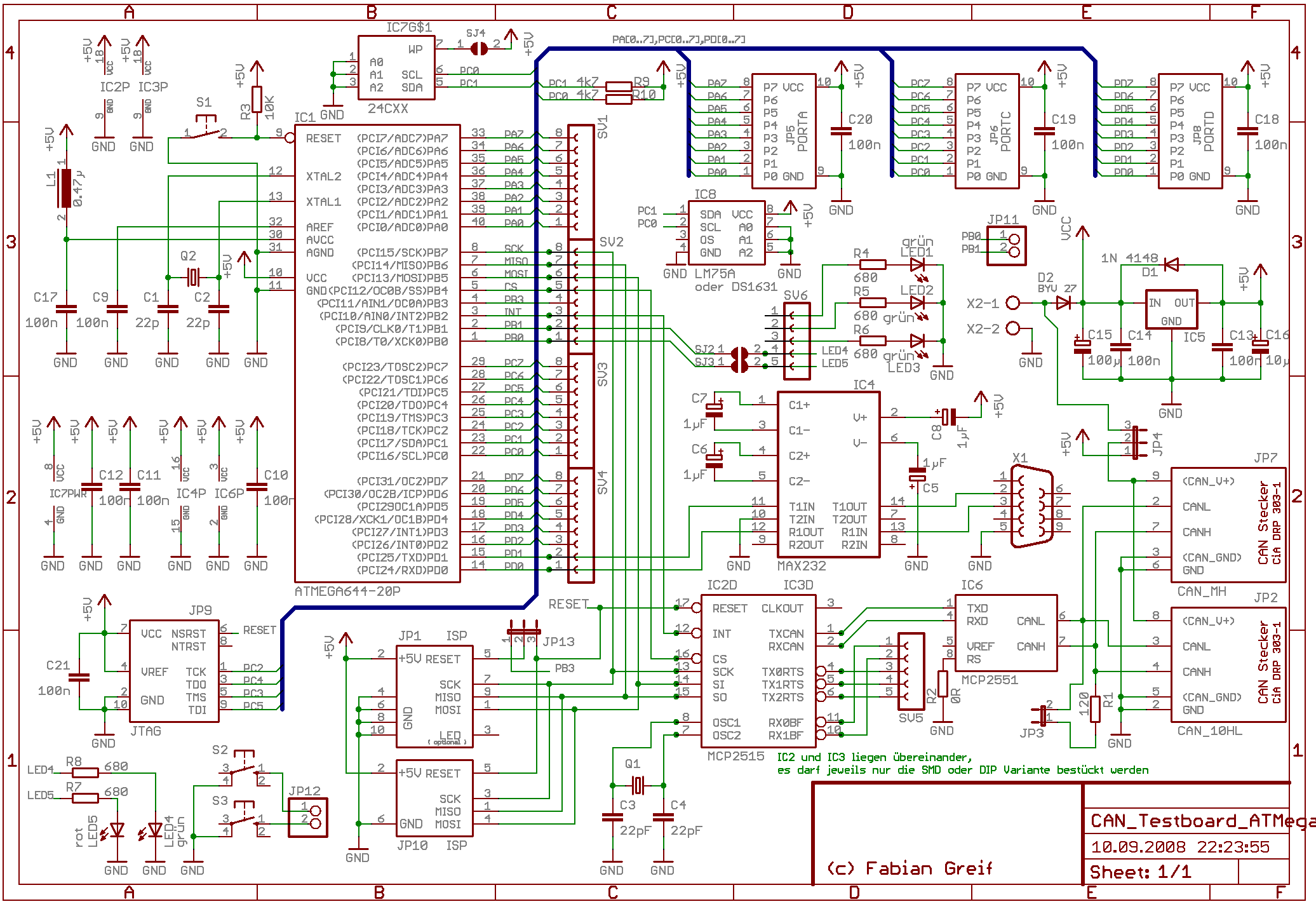
Bei den downloads gibt es neben den Eagle-Dateien auch noch einen Bestückungsplan sowie einen fertigen myReichelt-Warenkorb.
In dem Warenkorb sind allerdings die beiden SMD Bausteine (I2C-Temperatursensor & -Eeprom) von der Unterseite nicht enthalten, sie sind aber auf dem Bestückungsplan vermerkt.
Anschlüsse & Jumper
- JP3
- Über den Jumper kann man den CAN Abschlusswiderstand (120 Ohm) zuschalten. Dies sollte an den beiden äußersten Stelle des CAN Busses geschehen. Bei kurzen Strecken und/oder niedrigen Bitraten reicht aber auch nur ein Abschlusswiderstand.
- JP4
- Spannung von Pin 8 des Wannenstecker (Pin 9 des Sub-D Steckers) entweder über den Spannungregler oder direkt auf die +5V Versorgung legen. Falls +5V auf dem CAN Bus liegen muss der Stecker in Richtung von X2 gesteckt werden (ist auch auf der Platine markiert).
- JP13
-
Mit diesem Jumper kann man anstelle des Reset-Signals PB3 auf den 10-poligen Wannenstecker verbinden. Damit steht an diesem Stecker eine vollständige SPI Schnittstelle (mit PB3 als /CS) zu Verfügung. Dies ist nützlich um darüber zum Beispiel SPI Erweiterungen anzuschließen (SD Karte, Porterweiterungen usw). Braucht man weitere Signale muss sich diese dann über einen der anderen Stecker holen.
Damit ist dieser Stecker aber natürlich nicht zum Programmieren des AVR benutzbar, man muss dann zwingend den 6-poligen verwenden der davon unberührt ist.Um den AVR auch über 10-poligen Stecker programmieren zu können muss der Jumper in Richtung des Tasters gesteckt werden.
- SJ2 und SJ3 (auf der Unterseite)
- Über diese beiden Lötjumper lassen sich zwei LEDs direkt mit PB0 bzw. PB1 verbinden. Natürlich geht dies aber auch über Kabel auf der Oberseite.
Bilder
Version 1
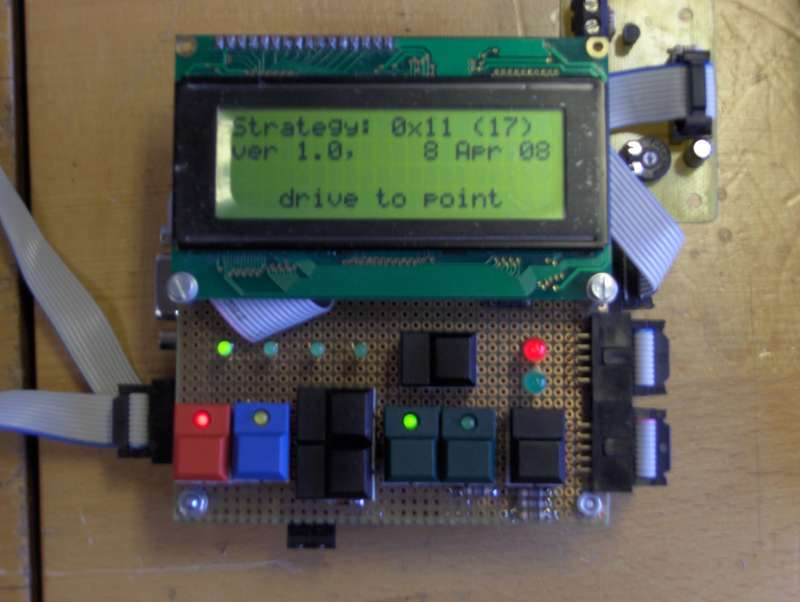
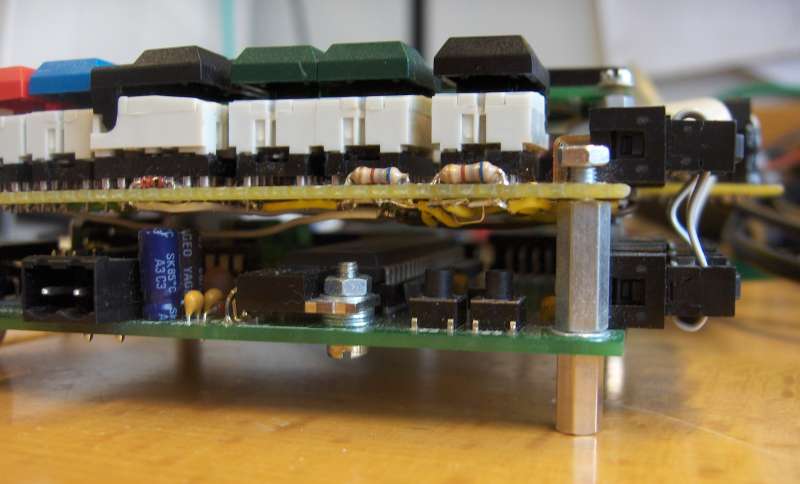
Auf den beiden hinteren beiden Bildern wurde das CAN Testboard verwendet um ein Display für unseren Roboter zu entwickeln und zu testen. Dafür bekam es einen Lochrasteraufbau mit entsprechenden Tastern, LEDs und einem Anschluss für ein LC-Display.
Hat noch jemand schöne Bilder von dem CAN Testboard in Aktion?
Downloads:
can_testboard40_v2.zip [392.56 kB]can_testboard40_v2_bestueckung.zip [24.06 kB]
can_testboard40.zip [291.48 kB]
Lizenz
 Alle Inhalte dieser Website sind, soweit nicht anders gekennzeichnet, unter einer Creative Commons 2.0 License veröffentlicht.
Alle Inhalte dieser Website sind, soweit nicht anders gekennzeichnet, unter einer Creative Commons 2.0 License veröffentlicht.
Wenn Sie sich für eine kommerzielle Verwertung meiner Inhalte interessieren, kontaktieren Sie mich bitte direkt.
Kommentare
# Jules meinte am 23. September 2008, 09:55 dazu:
Hallo,
gibt es irgendwo Beispielprogramme um mit der Programmierung von einfachen CAN Applikationen basierend auf diesem Board los zu starten?
# Fabian Greif meinte am 23. September 2008, 10:20 dazu:
Ja, es gibt die canlib.
Das Demo-Programm was in der Zip-Datei enthalten ist passt von den Einstellungen in der
config.hdirekt für dieses Board (falls ein ATMega32 bestückt ist). Also einfach das Programm compilieren, aufspielen und es läuft.# Hans meinte am 3. Oktober 2008, 13:22 dazu:
Hallo,
das Board ist sehr gut, gibt es auch ein demo mit twi (i2c) in C für den lm75 ?
# Sven meinte am 12. November 2008, 22:51 dazu:
Hallo, kennt jemand ein kleines Gehäuse, in das man die Platine packen kann? Die Anschlüsse würde ich auch statt auf der Platine am Gehäuse befestigen.
Viele Grüße Sven
# Rainer meinte am 6. Februar 2011, 10:20 dazu:
Hallo Fabian,
vielen Dank nochmals für die Platinen. Hab Sie eben fertig bestückt und mal die Spannungsversorgung getestet.
Ich wollte eigentlich nur nachfragen wie die Fuses zu setzen sind, damit der ATMEGA664 mit dem Testprogramm läuft.
Viele Grüße und Danke nochmals
Rainer
# Fabian Greif meinte am 8. Februar 2011, 00:11 dazu:
Hallo Rainer,
die Fuse-Bits sind fast egal da kein UART oder so verwendet wird.
Beim Takt muss man aufpassen das man da nicht falsches einstellt. Du kannst entweder den internen Takt verwenden oder auf den externen Quarz umstellen.
Für den MCP2515 ist das aber egal, er wird mit beiden Varianten funktionieren.
Grüße Fabian
# Fabian Greif meinte am 30. September 2013, 10:36 dazu:
Kommentare wegen zu viel SPAM geschlossen. Weitere Fragen bitte direkt per E-Mail an mich.