kreatives-chaos.com
Elektronik und Roboterbau
Themen:
AVR, avr-gcc, CAN, CPLD, Elektronik, Mikrocontroller, MSP430, PIC, Roboter, Schaltungen, Sensoren, Software, Testboards
Minisumo
Tags: Roboter
Stand: 1. August 2006, 21:21
4 Kommentar(e)
In Hinblick auf die Robochallenge 2003 habe ich angefangen einen MiniSumo Roboter zu bauen.
Hier erst mal die Grundregeln für MiniSumo:

- Maximal Abmessungen 10 x 10 cm; Höhe ist nicht begrenzt.
- Maximales Gewicht: 500g.
- Je zwei Roboter treten gegeneinander an.
- Ziel des Ganzen ist es den gegnerischen Roboter aus dem Ring zu befördern.
- Die Roboter müssen dabei vollkommen autonom handeln, dürfen also nicht ferngesteuert werden.
- Die Runden dauern bis zu drei Minuten.
- Ein Roboter hat verloren sobald irgend ein Teil von ihm den Boden außerhalb des Rings berührt (Es würde sogar zählen wenn er eine Schraube verliert und die aus dem Ring fällt).
- Der Roboter der als erstes zwei Runden gewinnt hat das Match gewonnen.
Erstmal ein paar Daten zu meinem Minisumo Roboter:
| Funktion | Wert |
|---|---|
| Abmessungen (L/B/H): | ca. 100 x 100 x 75 mm |
| Mikroprosessor: | ATMega 8 |
| Sensoren: | GP2D12 auf Servo vorne, Liniensensoren, Beschleunigungssensor (wird allerdings nicht genutzt) |
| Antrieb: | 2 umgebaute Servos |
| Spannungsversorgung: | 6 Zellen Sanyo Twinzell 700 mAh |


Die normale Sumo Klasse bei der RoboChallenge war mir immer zu groß. Als ich dann hörte dass es auch einen Mini Sumo Wettbewerb geben wird, habe mich spontan dazu entschlossen auch so ein Ding zu bauen.
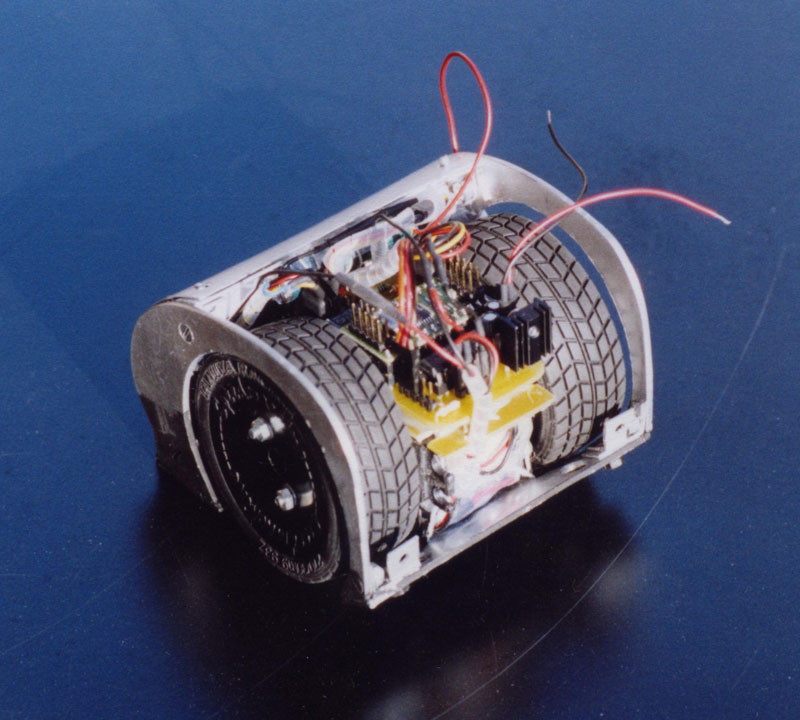
Der Antrieb besteht aus zwei umgebauten Modellbauservos. Da ich unbedingt Modellbaureifen verwenden wollte war ich gezwungen die Servos sehr stark zu modifizieren, da der Roboter sonst einfach viel größer als die maximalen 10cm geworden wäre. Also wurde die Elektronik komplett entfernt, außerdem ein Großteil des Gehäuses, so dass nur noch das Gehäuse um das Getriebe und den Motor übrig war. Dadurch ließen sich die Servos ganz gut zusammen schieben.
Das Chassis besteht komplett aus Aluminium. Die gekapselte Bauweise sieht zwar klasse aus (wie ich finde), hat aber leider den Nachteil das der Aufbau zu einer ziemlichen Fummelarbeit ausgeartet ist. Dafür ist das Ganze aber auch sehr stabil. Man kann halt nicht alles haben.
Auf der Grundplatte wurden kleine Winkel befestigt und daran dann die Seitenteile befestigt. Zwischen diesen ist dann im vorderen Bereich über der Öffnung für den Infrarotsensor noch eine Verstrebung angebracht. Diese dient einerseits zum Stabilisieren der Seitenteile, andererseits ist dort dann auch die obere Verkleidung nochmal befestigt.

In der Seitenansicht sieht man noch mal schön die Form. Die Ausbuchtung wird für den drehbaren GP2D12 gebraucht. Damit will ich versuchen den Gegner möglichst schnell zu finden um dann entsprechend reagieren zu können.
Damit mein Roboter nicht aus der Arena fällt, hat er vorne zwei Liniensensoren in Form von CNY70 Reflexkopplern. Das funktioniert ausgezeichnet, es wird bei dunklen Stellen eine Spannung von 3,96 V und bei weißen eine Spannung von 0,3 V gemessen, so dass die Erkennung sehr zuverlässig funktioniert.
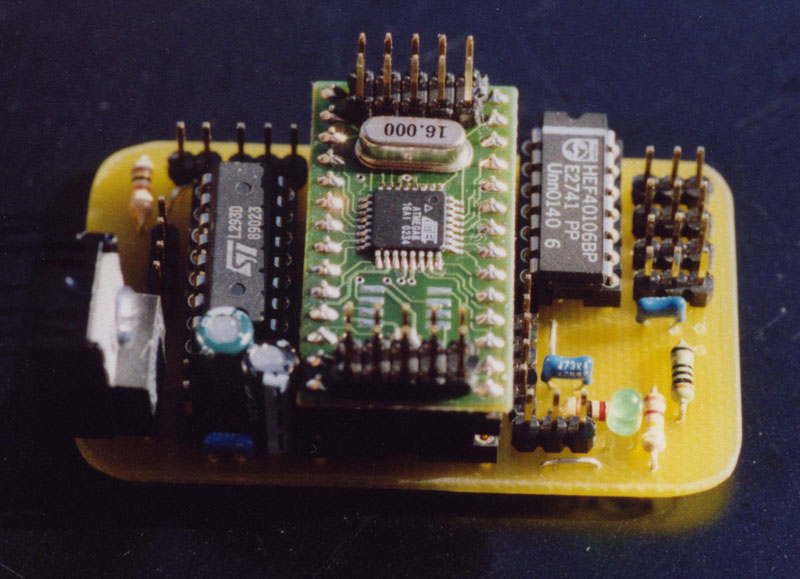
Der Rest der Elektronik ist nicht besonders aufregend: Er besteht hauptsächlich aus einem ATmega8 Modul von Embedit, einen L293D Motortreiber, einem Low-Drop Spannungsregler (LM2940CT5.0), einem Schmitt-Trigger IC (40106) für die Liniensensoren und den Anschlüssen für den Infrarotsensor, das Servo und den Taster. Das Ganze ist auf einer kleinen Platine untergebracht die genau zwischen den Rädern sitzt.
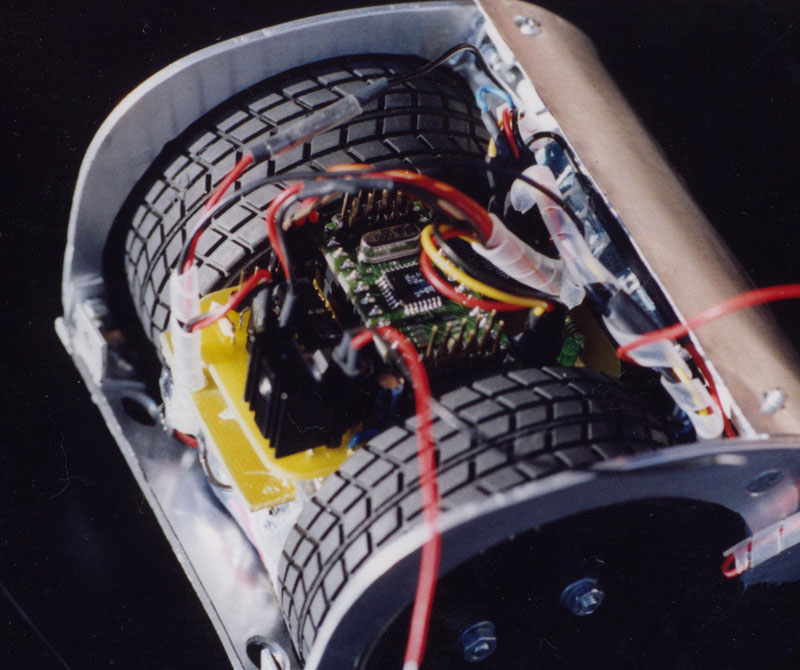
Um besser an die Elektronik zu kommen wurde dann auch noch ein Loch in die obere Verkleidung geschnitten, damit man sie nicht immer abbauen muss wenn man den Mikrocontroller neu programmierne möchte.
Nachtrag:
Leider hat sich heraus gestellt, dass die verwendeten Reifen viel zu wenig Haftung haben. Zudem ist der Roboter mit den umgebauten Servos nicht schnell genug um den Gegener gut attackieren zu können. Daher ist das Projekt erst einmal ins Regal gewandert. Vielleicht werde ich mich aber nochmal an einem neuen Minisumo versuchen ;-)
Lizenz
 Alle Inhalte dieser Website sind, soweit nicht anders gekennzeichnet, unter einer Creative Commons 2.0 License veröffentlicht.
Alle Inhalte dieser Website sind, soweit nicht anders gekennzeichnet, unter einer Creative Commons 2.0 License veröffentlicht.
Wenn Sie sich für eine kommerzielle Verwertung meiner Inhalte interessieren, kontaktieren Sie mich bitte direkt.
Kommentare
# Frank meinte am 6. April 2007, 23:12 dazu:
Hallo ich muss sagen, diese Seiten sind wirklich Super ich sitze hier schon mehre Tage und Stunden und finde immer wider was neues, was mich fesselt. Würdest du Dein Bauplan zu diesem Roboter veröffentlichen? Und das Programm wäre auch toll. Na ja ist vielleicht ein bisschen direkt aber wer weiß :-)
# Christian meinte am 22. April 2007, 23:33 dazu:
Schönes Gerät! Hast du das den Roboter mit Blei auf die nützlichen 500 Gram gebracht?
# Benj meinte am 29. Juni 2007, 12:42 dazu:
oke bissi spät ;) schon mit nem gummischlauch von nem fahrrad versucht? hab 2 kleine plastikräder mit so nem schlauch umwickelt reicht ganz gut, verwend halt nur 12v motoren mit eigenem getriebe
mfg Benj
# Festblatte meinte am 23. Oktober 2007, 16:00 dazu:
Hallo,
sehr interessant die kompakte bauweiße des Roboters
Deine Meinung: